Pesquisadores da Universidade Johns Hopkins (JHU) e da Universidade de Stanford, ambas dos Estados Unidos, informaram que um robô, treinado pela primeira vez assistindo a vídeos de cirurgiões experientes, executou os mesmos procedimentos cirúrgicos com habilidade comparável ao dos médicos humanos.
“É realmente mágico ter esse modelo e tudo o que fazemos é alimentá-lo com entrada de câmera e ele pode prever os movimentos robóticos necessários para a cirurgia”, disse o autor sênior Axel Krieger, professor assistente no Departamento de Engenharia Mecânica da JHU, em comunicado. “Acreditamos que isso marca um passo significativo em direção a uma nova fronteira na robótica médica.”
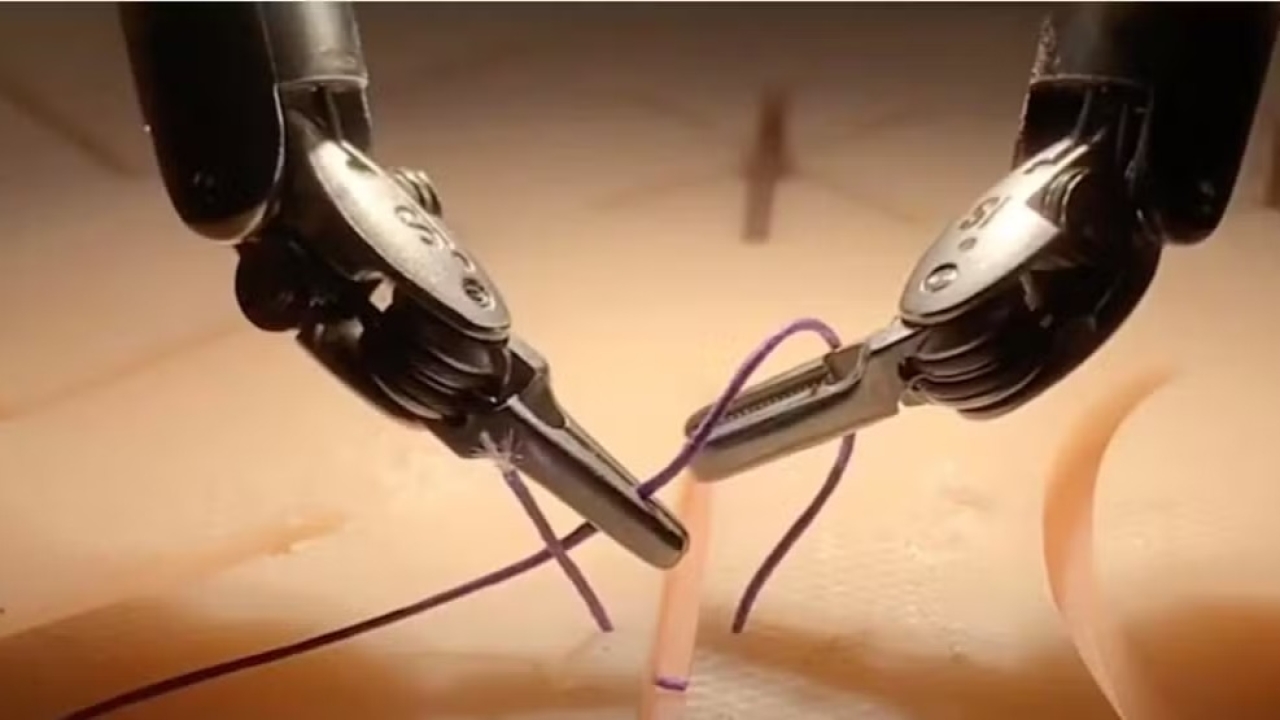
Neste trabalho, a equipe envolvida usou aprendizagem por imitação para treinar um robô do Sistema Cirúrgico da Vinci – que conta com 7 mil robôs em todo o mundo todo, e tem mais de 50 mil cirurgiões treinados nele – para executar três tarefas necessárias em procedimentos cirúrgicos: manipular uma agulha, levantar tecido corporal e suturar.
O modelo ainda combinou a mesma arquitetura de learning machine que sustenta o ChatGPT. No entanto, ao contrário do sistema da OpenAI que trabalha com palavras e texto, o das universidades usa cinemática, uma linguagem que decompõe os ângulos do movimento robótico em matemática.
Ele foi alimentado com centenas de vídeos gravados de câmeras de pulso colocadas nos braços dos robôs da Vinci durante procedimentos cirúrgicos. Esses vídeos, gravados por cirurgiões em todo o mundo, são utilizados para análise pós-operatória e, então, arquivados.
Os pesquisadores apontaram que, embora o sistema da Vinci seja amplamente usado, é notoriamente impreciso. Mas eles encontraram uma maneira de fazer funcionar: treinaram o modelo para executar movimentos relativos em vez de ações absolutas, que são imprecisas.
“Tudo o que precisamos é de entrada de imagem e então esse sistema de IA encontra a ação correta”, explicou o autor principal Ji Woong ‘Brian" Kim’, pesquisador de pós-doutorado na JHU. “Descobrimos que, mesmo com algumas centenas de demonstrações, o modelo é capaz de aprender o procedimento e generalizar novos ambientes que não encontrou.”
Krieger acrescentou que “o modelo é tão bom” que aprende coisas que não lhe foram ensinadas. “Se ele deixasse cair a agulha, ele a pegaria automaticamente e continuaria. Isso não é algo que eu o ensinei a fazer.”
Agora, a equipe está usando aprendizado de imitação para treinar um robô para executar não apenas pequenas tarefas cirúrgicas, mas uma cirurgia completa.
Fonte: Época Negócios